搜索算法
1. 提出问题

| 记号 | 说明 | |
|---|---|---|
| Initial state | s0 | 初始状态 |
| Action(s) | {a1,a2,a3...} | 在 s 状态下,可以选择的动作(例如可选路径) |
| Result(s,a) | s' | 经过s 状态及 a 动作之后的结果,例如在 s 点选择 a 路径可以达到 s' 位置 |
| Goal Test(s) | True or False | 判定是否到达终点 |
| Path Cost | cost value(n) | 一系列动作的开销 |
| Step Cost(s,a,s') | n | 一个动作的开销 |
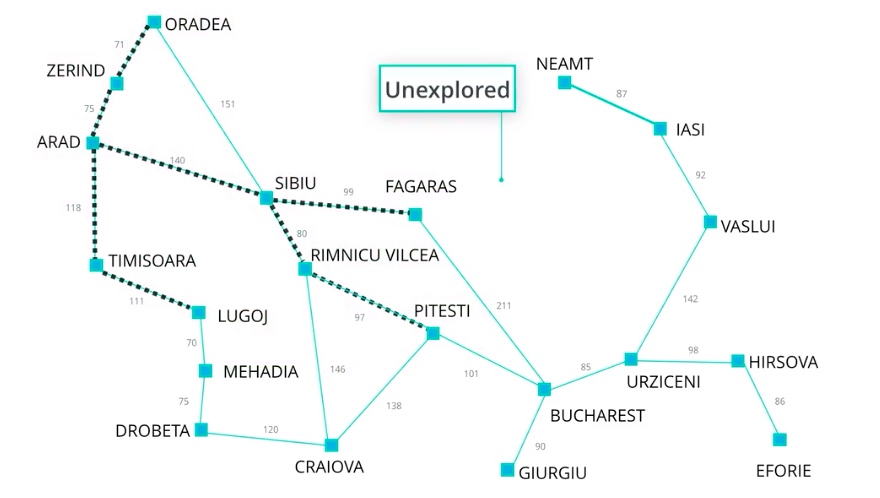
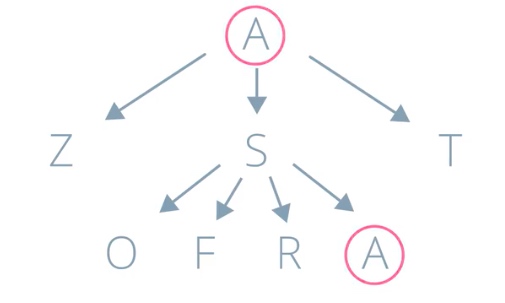
1. 起点和终点
是我们状态空间的初始状态(s0)和目标(goal)
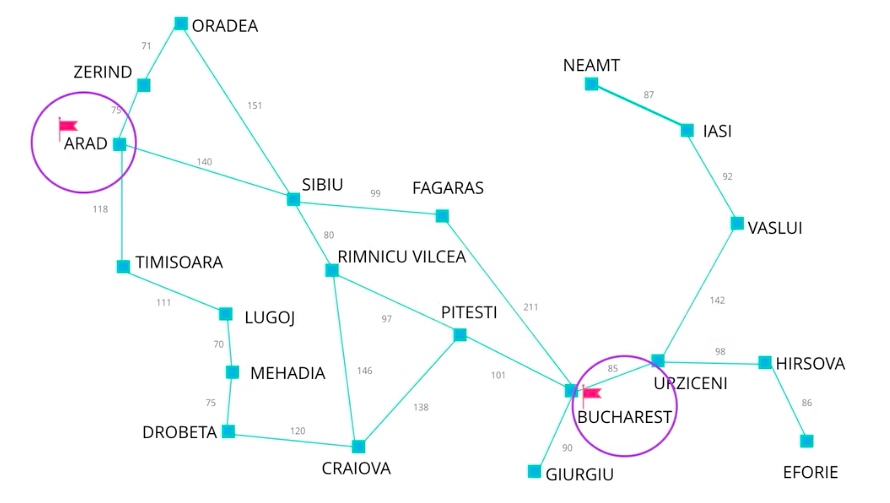
2. 动作
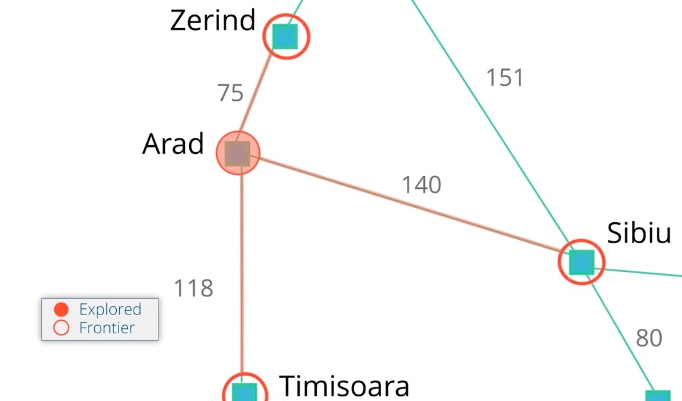
在状态s0时,也就是 ARAD,可以有三条路作为选择,即当前状态下可行的动作有三个{a1,a2,a3...}
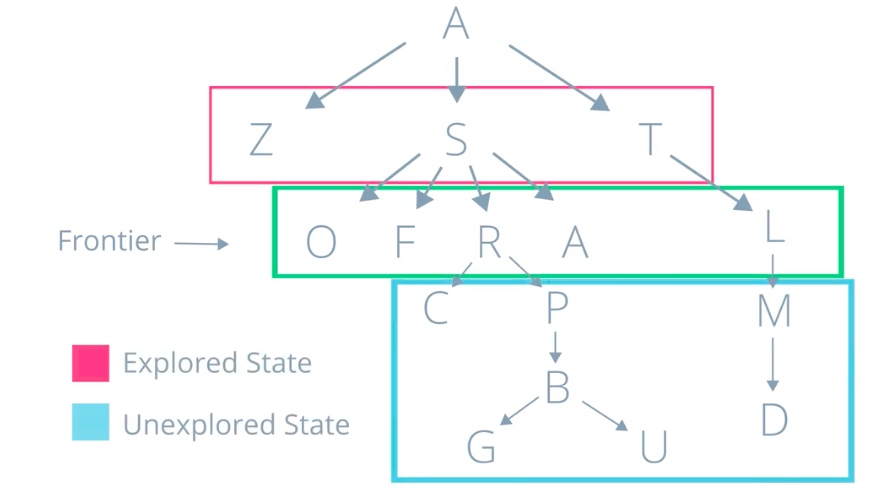
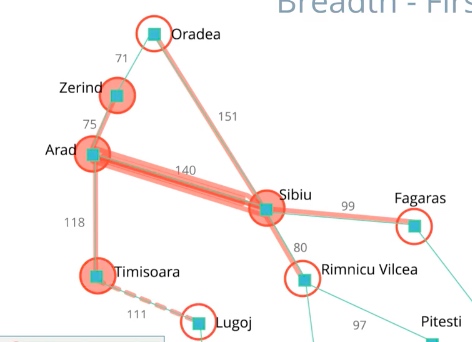
3. 边界
边界是我们当前已经探索到的最远的端点
4. 已探索区域
不包括边界的,所有已经探索过的状态

5. 未探索区域
未探索区域里面包含了目标
6. 单步开销
从一个状态s经过动作 a,转移到s' 所需要的开销
7. 路径总开销

2. 搜索算法
1. 搜索算法族
符号表
| 记号 | 说明 | |
|---|---|---|
| Initial state | s0 | 初始状态 |
| Action(s) | {a1,a2,a3...} | 在 s 状态下,可以选择的动作(例如可选路径) |
| Result(s,a) | s' | 经过s 状态及 a 动作之后的结果,例如在 s 点选择 a 路径可以达到 s' 位置 |
| Goal Test(s) | True or False | 判定是否到达终点 |
| Path Cost | cost value(n) | 一系列动作的开销 |
| Step Cost(s,a,s') | n | 一个动作的开销 |
伪代码
Tree.Search(problem p ) return path
frontier = {path(p.init)}
loop:
#如果边界集中已无状态
if frontier is empty : return fail
# 挑选边界集中的元素
path = remove.choice(frontier)
#移动到该路径的终点(新状态)
s = path.end
#检查新状态是否是终点
if goal test (s): return path
#如果没到终点,对于当前状态下的每一个可行动作
for a in p.Actions(s):
#把下一个状态添加到边界集中
add [path + a >Result(s,a)]
to frontier
2. 选路算法
在上面的伪代码中,关键步骤是选路的方法
remove.choice(frontier)
如何进行选路决定了算法的走向
| 算法 | 说明 |
|---|---|
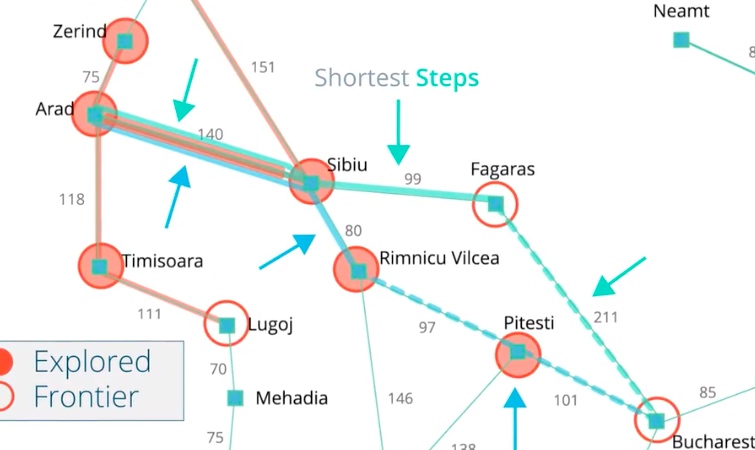
| 宽度优先算法(最短优先搜索) | 总是从边界中选择一个尚未考察的路径,且该路径是最短的一支 |
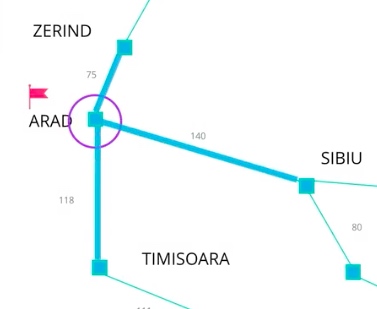
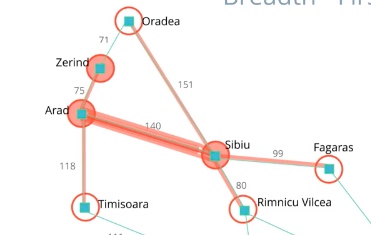
首先,将状态 s0(Arad)先从边缘中移除,并且基于状态 s0,找到可行的动作{a1,a2,a3},也就是三条路径,并将其终点(Result(s0,an))加入到边缘集中。
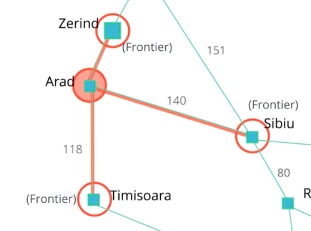
arad----zerind
arad----sibiu
arad---timisoara
这三条路实际上是等价的,也就是只需要一步,假设我们随机选一条路,到 sibiu
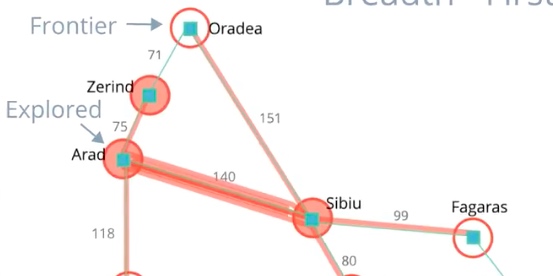
此时状态转移到 sibiu,接下来的关键步骤即扩展我们的探索集,也就是按照如下算法,添加新的路径到边界集中
for a in p.Actions(s):
#把下一个状态添加到边界集中
add [path + a >Result(s,a)]
to frontier
首先要考虑的一点是 p.Action(s)到底是哪些?
这个问题进行一些转换可以变为:假设我们站在 sibiu ,可以有几条路来选?
答案是四条:
sibiu ---- arad
sibiu ---- fagaras
sibiu ---- rimnicu vilcea
sibiu ---- oradea
但是我们需要考虑到老路径:add [path + a >Result(s,a)]
(即我们是如何到达该状态的动作也要包含)
因此实际路径就是
arad ---- sibiu ---- arad
arad ---- sibiu ---- fagaras
arad ---- sibiu ---- rimnicu vilcea
sibiu ---- oradea
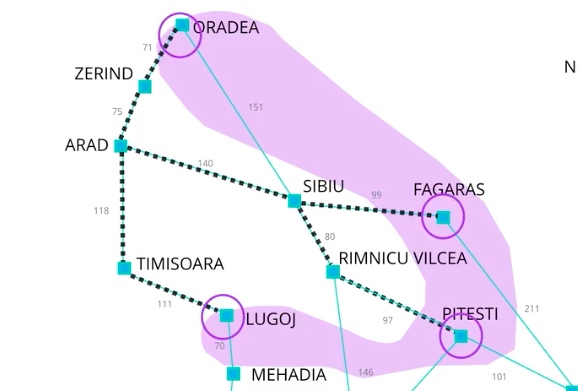
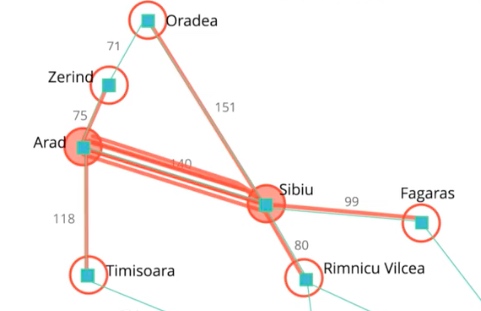
如下图,树搜索其实就是在空间中不断叠加树状结构,因此难以避免重复
3. 图搜索
为了避免重复,我们必须要记录已经探索过的路径
将树状结构按层级,分成已探索,边缘,未探索三个集合。
function Graph.Search(problem ) :
frontier = {[initial]};explored={}
loop:
#如果边界集中已无状态
if frontier is empty : return fail
# 挑选边界集中的元素
path = remove.choice(frontier)
#移动到该路径的终点(新状态)
s = path.end; add s to explored
#检查新状态是否是终点
if s is a goal:return path
#如果没到终点,对于当前状态下的每一个可行动作
for a in actions:
#把下一个状态添加到边界集中
add [path + a ->Result(s,a)]
to frontier
Unless Result(s,a) in frontier or explored
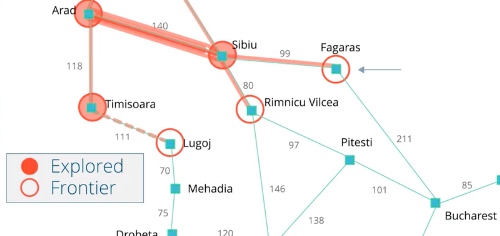
如果利用的是图搜索,去掉重复路径,当前有如下路径可供选择
arad---- zerind (checked)
arad---- sibiu (checked)
arad ---- sibiu ---- fagaras
arad ---- sibiu ---- rimnicu vilcea
arad ---- sibiu ---- oradea
arad ---- timisoara --- lugoj
然后选择哪一点呢?
由于是宽度优先,所以选择最短路径,arad---- zerind 或者arad---- timisoara都可以
假设选择到 zerind
接下来如何选择?
在状态 zerind 时,action 有两个
zerind --- oradea (无法添加,因为 oradea已经属于 frontier)
zerind --- arad (无法添加,因为 arad 已经属于 explored)
所以当前路径为
arad---- zerind (checked)
arad---- sibiu (checked)
arad ---- sibiu ---- fagaras
arad ---- sibiu ---- rimnicu vilcea
arad ---- sibiu ---- oradea
arad ---- timisoara --- lugoj
接下来如何选择?
arad---- zerind (checked)
arad---- sibiu (checked)
arad ---- sibiu ---- fagaras
arad ---- sibiu ---- rimnicu vilcea
arad ---- sibiu ---- oradea
arad ---- timisoara --- lugoj
此时最短路径为arad---- timisoara
当处于状态timisoara时,action 有一个(到 timisoara)
timisoara --- lugoj
将其加入路径表
arad---- zerind (checked)
arad---- sibiu (checked)
arad---- timisoara (checked)
arad ---- sibiu ---- fagaras
arad ---- sibiu ---- rimnicu vilcea
arad ---- sibiu ---- oradea
arad ---- timisoara --- lugoj
至此,我们还有3条 cost 为2 的路径可以探索
移动到 fagaras 之后,action 有
fagaras --- sibiu (无法添加,因为 sibiu已经属于 explored)
fagaras --- bucharest
此时虽然看上去已经到终点了,但实际上不是。 一个节点只有在 remove的时候才会去进行检测,加入 frontier 时不会。除非我们有一些假设:
- 我们使用宽度优先算法
- 没有cost为2.5的路径
此时我们可以在加入时就进行检测,但是如果我们期望获得真实长度最短的路径,此时的结果可能不是最佳的。
4. 最小耗散优先算法
目的:找到总耗散最小的路径
开始时仍然是3个 action
| frontier | explored |
|---|---|
| zerind | arad |
| sibiu | |
| timisoara |
arad---- zerind (75)
arad---- sibiu (140)
arad---- timisoara (118)
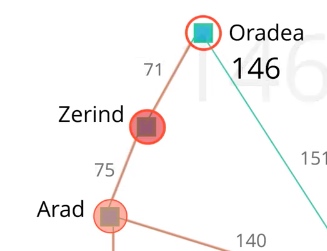
选择 cost 最小的路径,我们移动到 zerind
arad---- zerind (75)---oradea (71+75=146)
arad---- sibiu (140)
arad---- timisoara (118)
| frontier | explored |
|---|---|
| oradea | arad |
| sibiu | zerind |
| timisoara |
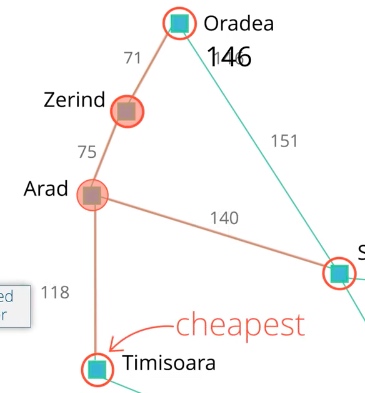
arad---- zerind (75)---oradea (71+75=146)
arad---- sibiu (140)
arad---- timisoara (118)
选择 cost 最小的路径,我们移动到 timisoara
| frontier | explored |
|---|---|
| oradea | arad |
| sibiu | zerind |
| timisoara |
arad---- zerind (75)---oradea (71+75=146)
arad---- sibiu (140)
arad---- timisoara (118) --lugoj(118+111=229)
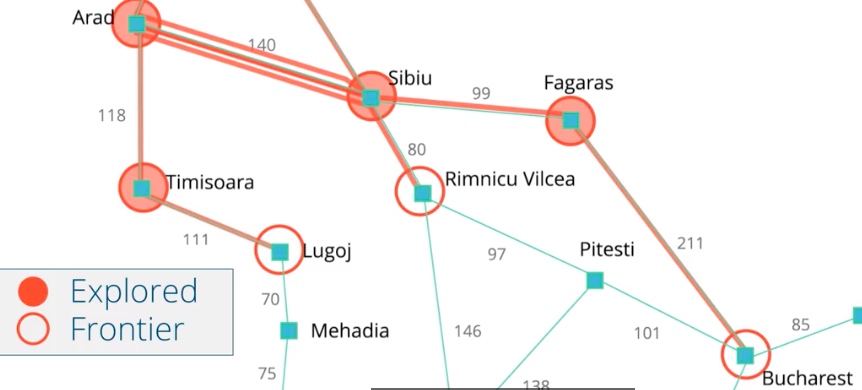
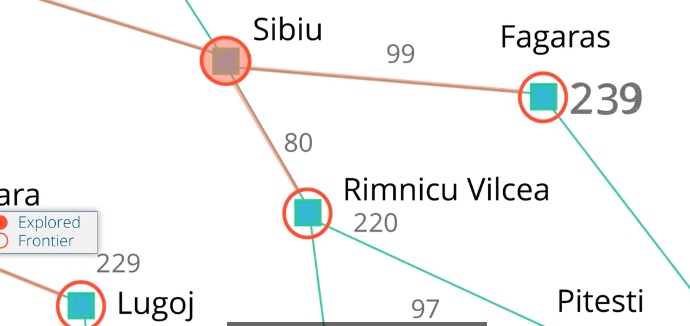
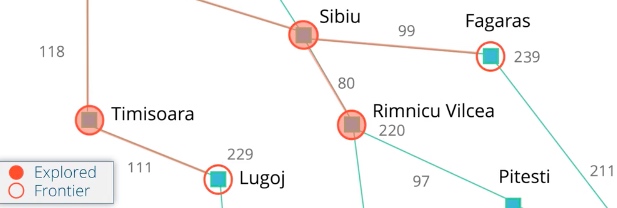
选择最短路径,到达 sibiu,添加 action
| frontier | explored |
|---|---|
| oradea | arad |
| lugoj | zerind |
| fagaras | timisoara |
| rimnicu vilcea | sibiu |
arad---- zerind (75)---oradea (71+75=146)
arad---- sibiu (140)(checked)
arad---- sibiu (140)---fagaras(140+99=239)
arad---- sibiu (140)---rimnicu vilcea(140+80=220)
arad---- timisoara (118) --lugoj(118+111=229)
选择最短路径,到达 oradea,没有可添加的 action
| frontier | explored |
|---|---|
| arad | |
| lugoj | zerind |
| fagaras | timisoara |
| rimnicu vilcea | sibiu |
| oradea |
arad---- zerind (75)---oradea (71+75=146)(checked)
arad---- sibiu (140)(checked)
arad---- sibiu (140)---fagaras(140+99=239)
arad---- sibiu (140)---rimnicu vilcea(140+80=220)
arad---- timisoara (118) --lugoj(118+111=229)
选择最短路径,到达 rimnicu vilcea,没有可添加的 action
| frontier | explored |
|---|---|
| arad | |
| lugoj | zerind |
| fagaras | timisoara |
| sibiu | |
| oradea | |
| rimnicu vilcea |
arad---- zerind (75)---oradea (71+75=146)(checked)
arad---- sibiu (140)(checked)
arad---- sibiu (140)---fagaras(140+99=239)
arad---- sibiu (140)---rimnicu vilcea(140+80=220)(checked)
arad---- timisoara (118) --lugoj(118+111=229)
选择最短路径,到达 rimnicu vilcea,添加 action
| frontier | explored |
|---|---|
| arad | |
| lugoj | zerind |
| fagaras | timisoara |
| pitesti | sibiu |
| craiova | oradea |
| rimnicu vilcea |
arad---- zerind (75)---oradea (146)(checked)
arad---- sibiu (140)(checked)
arad---- sibiu (140)---fagaras(140+99=239)
arad---- sibiu (140)---rimnicu vilcea(220)(checked)
arad---- timisoara (118) --lugoj(118+111=229)
arad---- sibiu (140)---rimnicu vilcea(220)---pitesti(220+97=317)
arad---- sibiu (140)---rimnicu vilcea(220)---craiova(220+146=366)
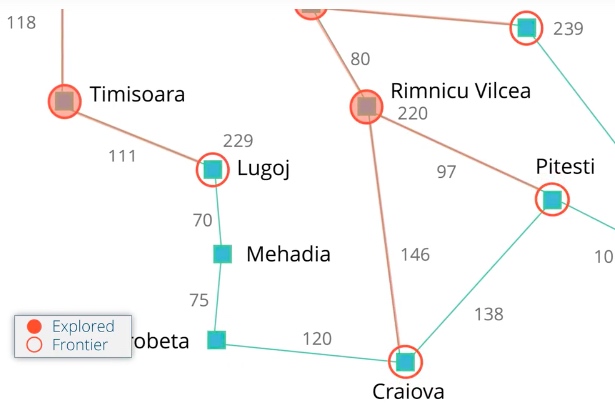
选择最短路径,到达 lugoj,添加 action
| frontier | explored |
|---|---|
| arad | |
| zerind | |
| fagaras | timisoara |
| pitesti | sibiu |
| craiova | oradea |
| mehadia | rimnicu vilcea |
| lugoj |
arad---- zerind (75)---oradea (146)(checked)
arad---- sibiu (140)(checked)
arad---- sibiu (140)---fagaras(140+99=239)
arad---- sibiu (140)---rimnicu vilcea(220)(checked)
arad---- timisoara (118) --lugoj(229)(checked)
arad---- sibiu (140)---rimnicu vilcea(220)---pitesti(220+97=317)
arad---- sibiu (140)---rimnicu vilcea(220)---craiova(220+146=366)
arad---- timisoara (118) --lugoj(229)---mehadia(299)
选择最短路径,到达 lugoj,添加 action
| frontier | explored |
|---|---|
| arad | |
| zerind | |
| timisoara | |
| pitesti | sibiu |
| craiova | oradea |
| mehadia | rimnicu vilcea |
| bucharest | lugoj |
| fagaras |
arad---- zerind (75)---oradea (146)(checked)
arad---- sibiu (140)(checked)
arad---- sibiu (140)---fagaras(239)(checked)
arad---- sibiu (140)---rimnicu vilcea(220)(checked)
arad---- timisoara (118) --lugoj(229)(checked)
arad---- sibiu (140)---rimnicu vilcea(220)---pitesti(220+97=317)
arad---- sibiu (140)---rimnicu vilcea(220)---craiova(220+146=366)
arad---- timisoara (118) --lugoj(229)---mehadia(299)
arad---- sibiu (140)---fagaras(239)---bucharest(239+211=450)
虽然终点已经被添加到了边缘集,但是搜索仍然需要继续。
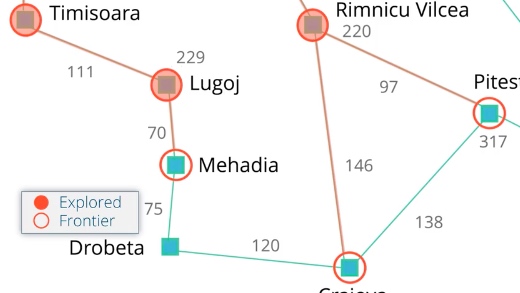
选择最短路径,到达 mehadia,添加 action
| frontier | explored |
|---|---|
| arad | |
| zerind | |
| timisoara | |
| pitesti | sibiu |
| craiova | oradea |
| rimnicu vilcea | |
| bucharest | lugoj |
| drobeta | fagaras |
| mehadia |
arad---- zerind (75)---oradea (146)(checked)
arad---- sibiu (140)(checked)
arad---- sibiu (140)---fagaras(239)(checked)
arad---- sibiu (140)---rimnicu vilcea(220)(checked)
arad---- timisoara (118) --lugoj(229)(checked)
arad---- timisoara (118) --lugoj(229)---mehadia(299)(checked)
arad---- sibiu (140)---rimnicu vilcea(220)---pitesti(220+97=317)
arad---- sibiu (140)---rimnicu vilcea(220)---craiova(220+146=366)
arad---- sibiu (140)---fagaras(239)---bucharest(239+211=450)
arad---- timisoara (118) --lugoj(229)---mehadia(299)---drobeta(374)
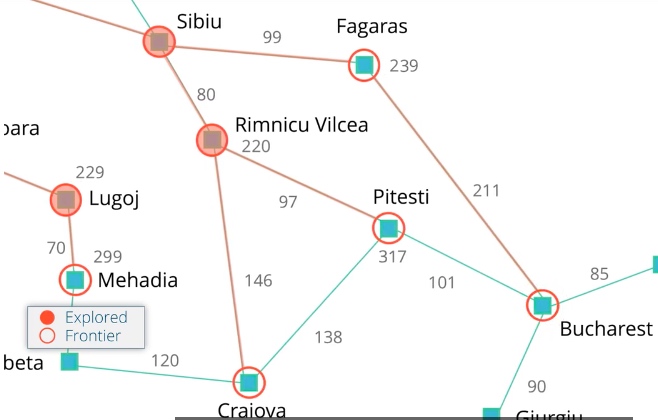
选择最短路径,到达 pitesti,两个 action,到 craiova 的耗散更大所以放弃,到 buchares
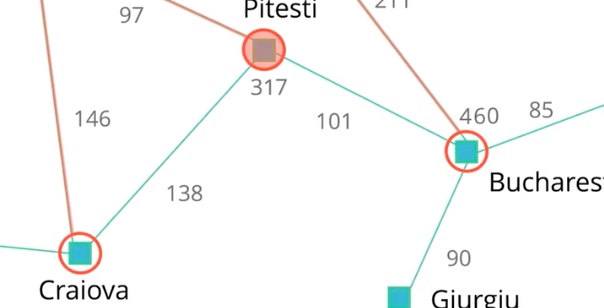
最后我们得到了一条更短的路径
arad---- sibiu (140)---rimnicu_vilcea(220)---pitesti(317)---bucharest(418)
arad---- sibiu (140)---fagaras(239)---bucharest(450)
以此类推,我们还需要将其他边缘集中的节点也再检查一遍,此处不再赘述,因为没有更好的路径了。
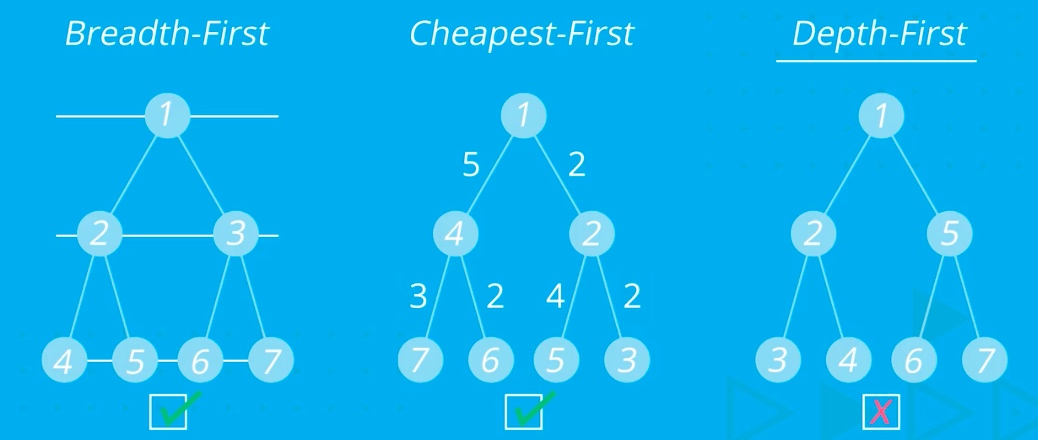
5. 算法比较[^1]
| 广度优先 | 最小耗散 | 深度优先 | |
|---|---|---|---|
| 目标 | 优先拓展最浅层(步骤最少) | 优先拓展最短路径 | 优先最长路径 |
| 储存路径 | 2^n | 2^n | n |
| 是否最优 | Y | Y | N |
| 是否完备 | Y | Y | N |
注:是否最优,表示是否能够确保找到最短路径 注:是否完备,表示是否能够确保完成算法
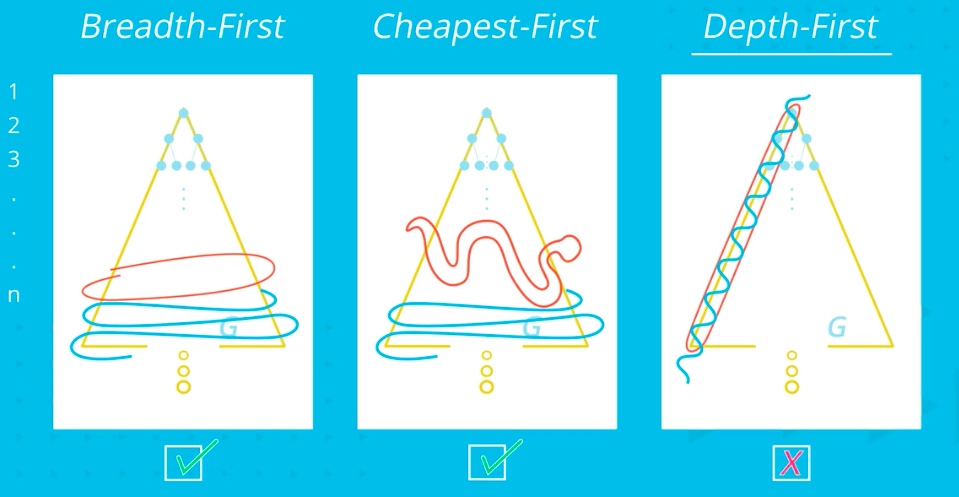 虽然深度优先储存空间最小,但是如果考虑无穷大的场景,它可能会沿着一条边一直寻找,如果目标在其他边则永远无法找到。
虽然深度优先储存空间最小,但是如果考虑无穷大的场景,它可能会沿着一条边一直寻找,如果目标在其他边则永远无法找到。
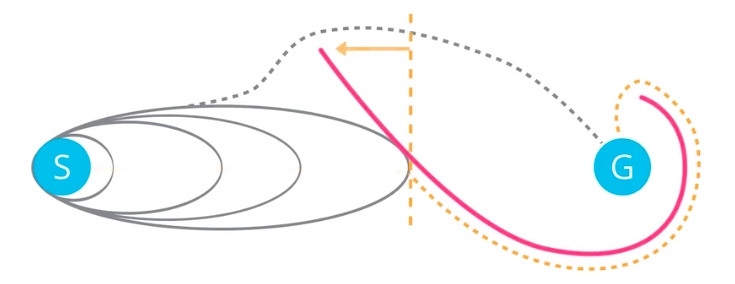
6. 贪婪最佳搜索
优先考察里目标最近的路径
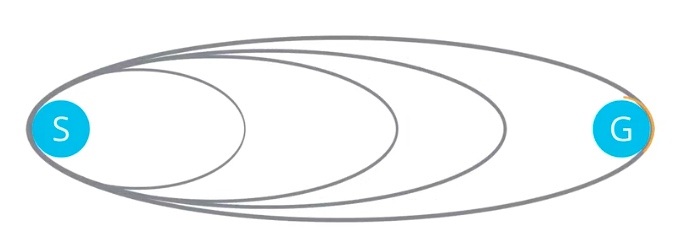
困局:当在起点和终点之间有障碍时,可能导致结果不是最佳的