扩展卡尔曼滤波器
卡尔曼滤波算法包括以下几个步骤:
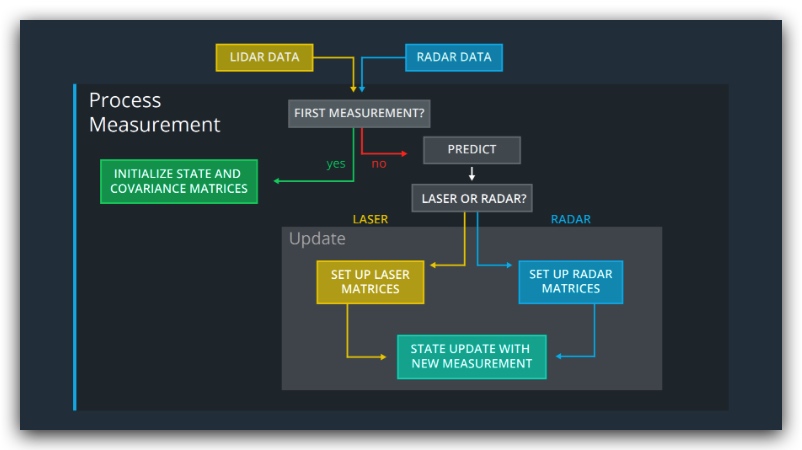
- 首次测量 - 滤波器首先会得到自行车相对于汽车位置的初始测量值,该数据来自雷达或激光雷达。
- 初始化状态空间或者协方差矩阵
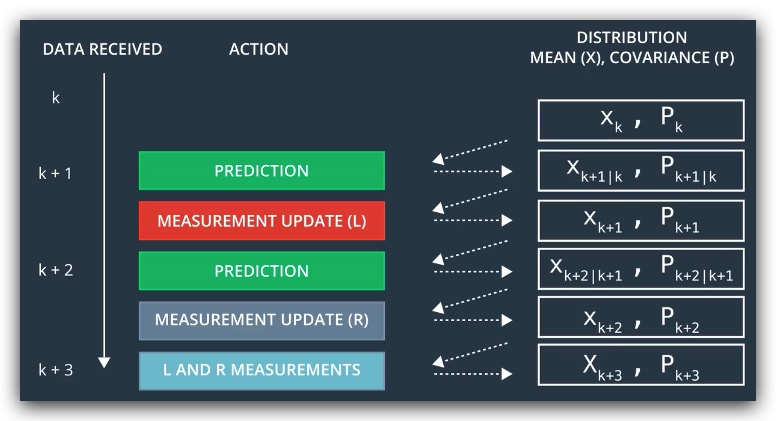
- t事件后,收到另外一次测量数据
- 预测 - 算法首先预测t时间后自行车的位置。通常会假定自行车速度为常量,x=vt进行计算
- 更新 - 滤波器将预测值和传感器的测量值进行比较。基于预测值和测量值共同给出更新后的位置。根据预测值和测量值的不确定性,给二者不同的权重。
- 随后,再次收到测量数据,进行下一次的预测和更新循环
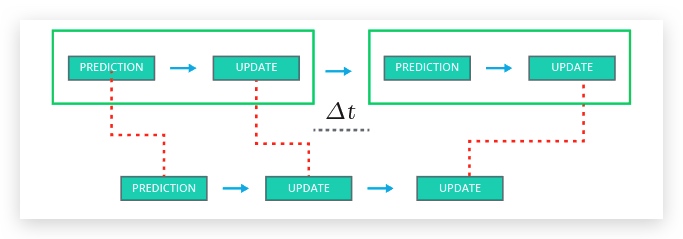
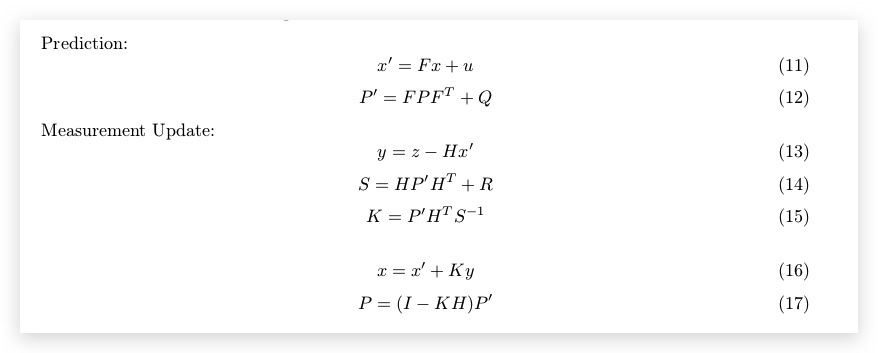
预测
如果两个传感器的数据同时到达,则使用一个进行预测,另外一个进行测量更新
Kalman Filter Equations in C++
#include <iostream>
#include "Dense"
#include <vector>
using namespace std;
using namespace Eigen;
//Kalman Filter variables
VectorXd x; // 状态向量
MatrixXd P; // 协方差矩阵
VectorXd u; // 运动控制向量
MatrixXd F; // 状态转移矩阵
MatrixXd H; // 测量矩阵
MatrixXd R; // 测量协方差矩阵
MatrixXd I;
MatrixXd Q; // 处理协方差矩阵
vector<VectorXd> measurements;
void filter(VectorXd &x, MatrixXd &P);
int main() {
// 变量初始化
x = VectorXd(2);
x << 0, 0;
P = MatrixXd(2, 2);
P << 1000, 0, 0, 1000;
u = VectorXd(2);
u << 0, 0;
F = MatrixXd(2, 2);
F << 1, 1, 0, 1;
H = MatrixXd(1, 2);
H << 1, 0;
R = MatrixXd(1, 1);
R << 1;
I = MatrixXd::Identity(2, 2);
Q = MatrixXd(2, 2);
Q << 0, 0, 0, 0;
// 构造一组测量值
VectorXd single_meas(1);
single_meas << 1;
measurements.push_back(single_meas);
single_meas << 2;
measurements.push_back(single_meas);
single_meas << 3;
measurements.push_back(single_meas);
//卡尔曼滤波
filter(x, P);
return 0;
}
// 卡尔曼滤波器
// 输入测量值向量,协方差矩阵
void filter(VectorXd &x, MatrixXd &P) {
for (unsigned int n = 0; n < measurements.size(); ++n) {
VectorXd z = measurements[n];
/*
* KF Measurement update step
*/
VectorXd y = z - H * x; //测量值更新(测量值-当前预测值)
MatrixXd Ht = H.transpose();
MatrixXd S = H * P * Ht + R;//估计误差+测量误差
MatrixXd Si = S.inverse();
MatrixXd K = P * Ht * Si;//卡尔曼增益
//new state
x = x + (K * y); // 卡尔曼增益作为权重结合测量值计算新状态
P = (I - K * H) * P;
/*
* KF Prediction step
*/
x = F * x + u; // 新状态预测
MatrixXd Ft = F.transpose();
P = F * P * Ft + Q; //新协方差矩阵预测
std::cout << "x=" << std::endl << x << std::endl;
std::cout << "P=" << std::endl << P << std::endl;
}
}
x=
0.999001
0
P=
1001 1000
1000 1000
x=
2.998
0.999002
P=
4.99002 2.99302
2.99302 1.99501
x=
3.99967
1
P=
2.33189 0.999168
0.999168 0.499501
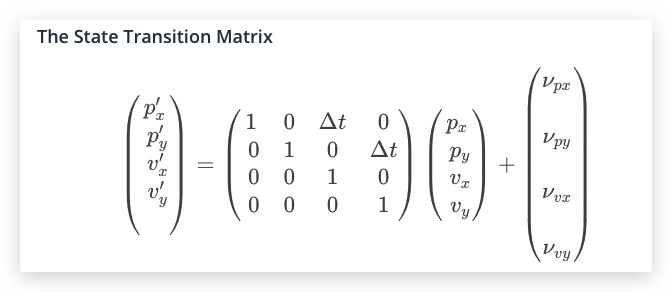
状态估计
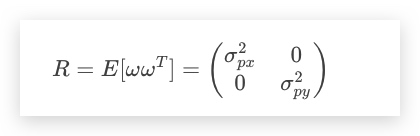
测量协方差矩阵
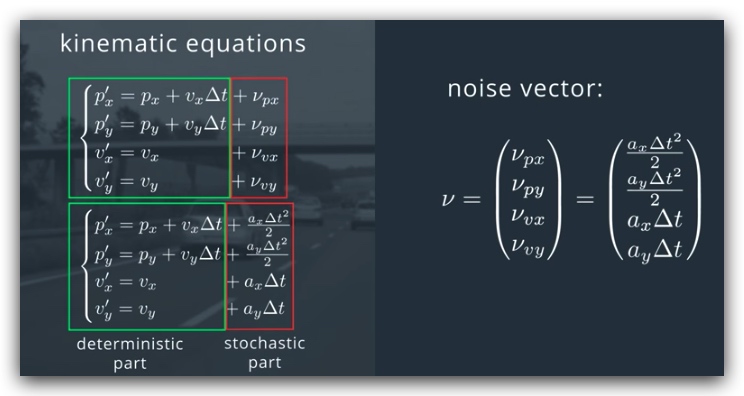
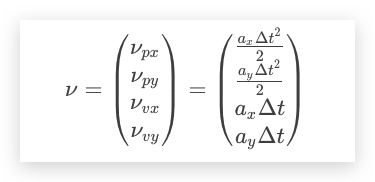
我们假定观测目标的速度在我们观察的时间内是恒定的,但是实际上并不是而且我们无法得知加速度大小,所以我们将加速度产生的位移作为误差添加到方程中。
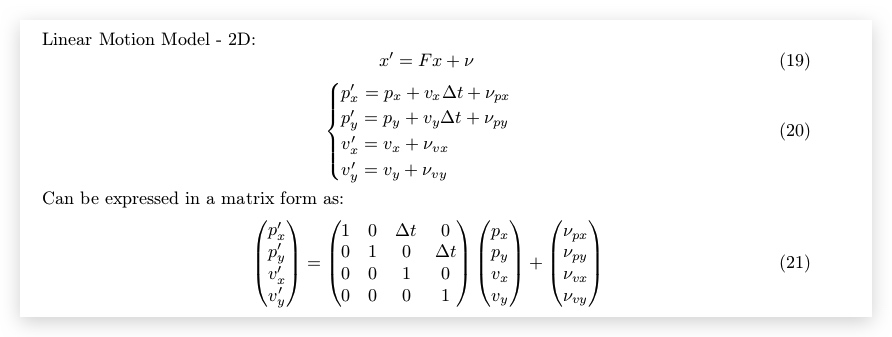 其中,误差v表示如下:
其中,误差v表示如下:
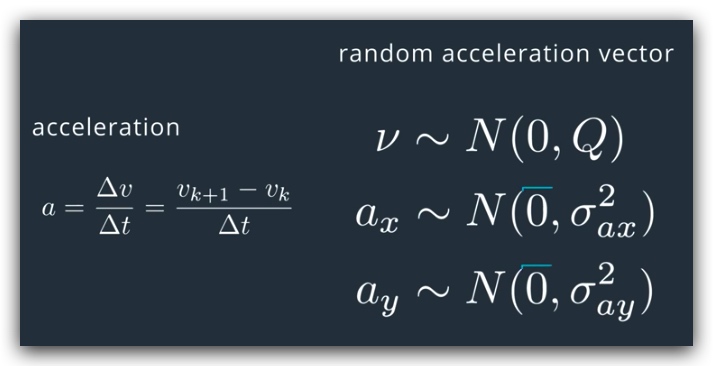
我们用正态分布来表示它,即$ \nu \sim N(0,Q)$,该误差符合正态分布切均值为0,协方差为Q。
进而我们可以将加速度分离出来
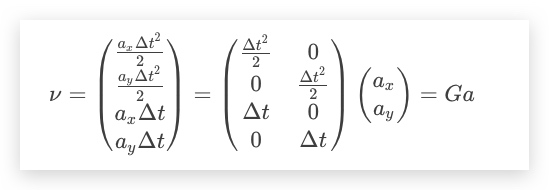
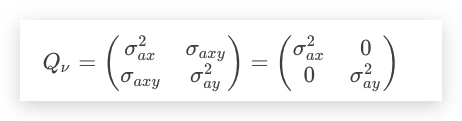
协方差Q表示为:
$Q = E[\nu \nu^T] = E[Gaa^TG^T] $

- the expectation of ax times ax, which is the variance of ax:$\sigma_{ax}^2$
- the expectation of ay times ay, which is the variance of ay: $\sigma_{ay}^2σ $
- and the expectation of ax times ay, which is the covariance of $ax$ and $ay$: $\sigma_{axy}$
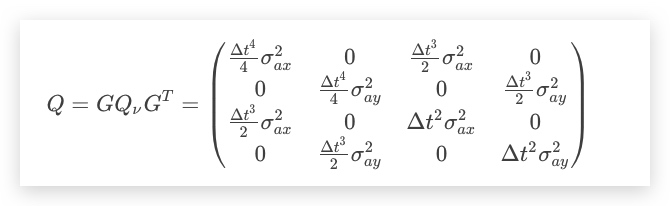
如果我们加上x,y两个方向上的加速度不相关,则Q变换为:
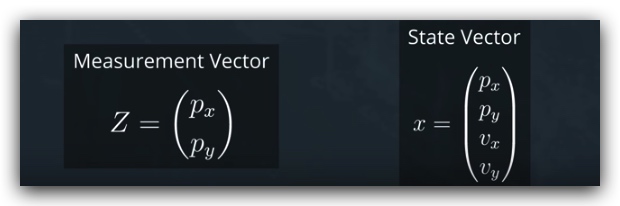
激光雷达数据
 激光雷达采集到点云,检测物体并得到物体的位置,而没有速度信息。因此我们的测量值Z是一个二维向量:
激光雷达采集到点云,检测物体并得到物体的位置,而没有速度信息。因此我们的测量值Z是一个二维向量:
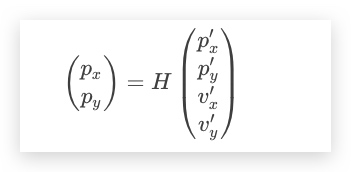
则y=Z-H*x中H为:

测量误差R:它表示从激光雷达引入的位置测量误差,一般是传感器本身的属性,由供应商提供。
#include "kalman_filter.h"
void KalmanFilter::Predict() {
x_ = F_ * x_;
MatrixXd Ft = F_.transpose();
P_ = F_ * P_ * Ft + Q_;
}
void KalmanFilter::Update(const VectorXd &z) {
VectorXd z_pred = H_ * x_;
VectorXd y = z - z_pred;
MatrixXd Ht = H_.transpose();
MatrixXd S = H_ * P_ * Ht + R_;
MatrixXd Si = S.inverse();
MatrixXd PHt = P_ * Ht;
MatrixXd K = PHt * Si;
//new estimate
x_ = x_ + (K * y);
long x_size = x_.size();
MatrixXd I = MatrixXd::Identity(x_size, x_size);
P_ = (I - K * H_) * P_;
}
雷达数据
雷达可以测量目标的位置和速度,但是位置精度不高。此外,雷达测量数据是基于极坐标系的,因此使用h(x)将数据转换到直角系中。
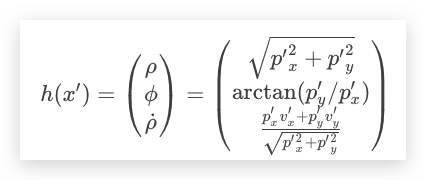
测量值$ y = z - h(x^')$
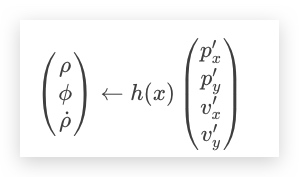
h(x)是非线性的
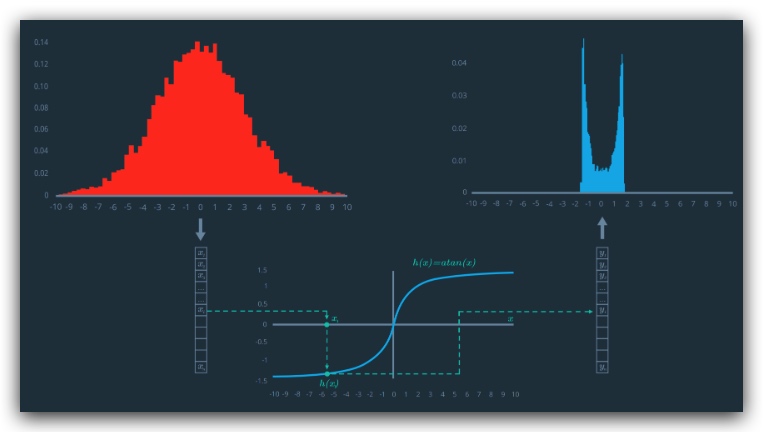
泰勒公式
如果测量函数为非线性,则误差分布不满足正态分布
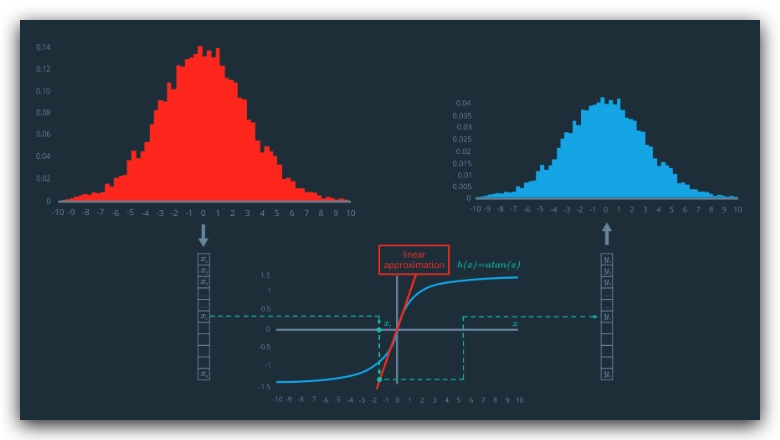 我们可以通过求函数在某个点处的泰勒展开式,将其线性化。
我们可以通过求函数在某个点处的泰勒展开式,将其线性化。
函数在某点的一阶泰勒公式表示为:
$f(x)≈f(μ)+ \frac{∂x}{∂f(μ)}(x−μ)$
多元泰勒公式表示为:

雅可比矩阵
上面公式中,一阶的系数Df(a)叫做雅可比矩阵,我们忽略二阶及高阶项。
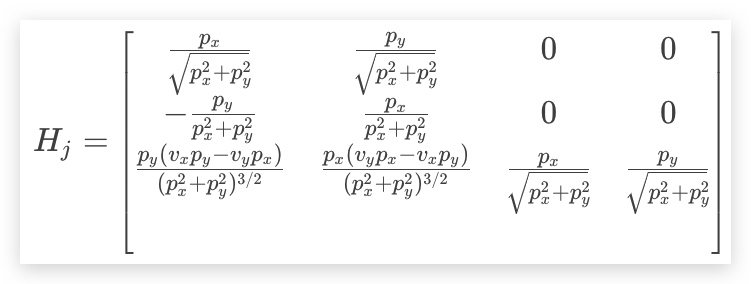
代码实现
MatrixXd CalculateJacobian(const VectorXd& x_state) {
MatrixXd Hj(3,4);
//recover state parameters
float px = x_state(0);
float py = x_state(1);
float vx = x_state(2);
float vy = x_state(3);
//pre-compute a set of terms to avoid repeated calculation
float c1 = px*px+py*py;
float c2 = sqrt(c1);
float c3 = (c1*c2);
//check division by zero
if(fabs(c1) < 0.0001){
cout << "CalculateJacobian () - Error - Division by Zero" << endl;
return Hj;
}
//compute the Jacobian matrix
Hj << (px/c2), (py/c2), 0, 0,
-(py/c1), (px/c1), 0, 0,
py*(vx*py - vy*px)/c3, px*(px*vy - py*vx)/c3, px/c2, py/c2;
return Hj;
}
扩展卡尔曼滤波
扩展卡尔曼滤波就是为了解决,普通卡尔曼滤波只能应用于线性空间的问题。
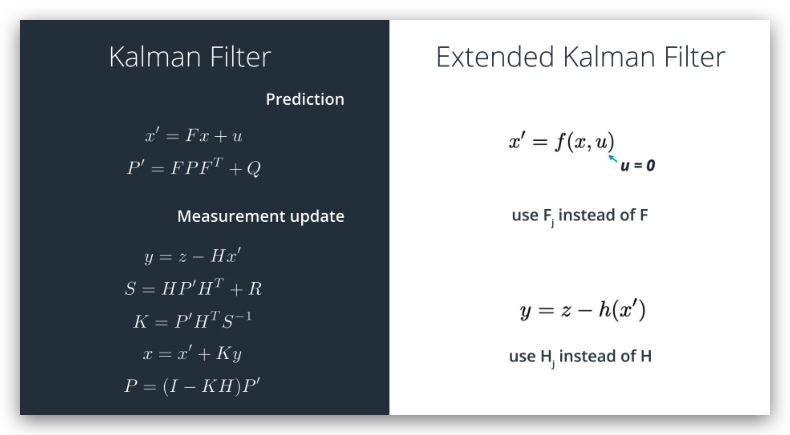
- 预测步骤使用非线性方程f(x,u)代替了线性的状态转移矩阵F
- 测量步骤中使用非线性方程h(x)代替了线性的状态转移矩阵H
- 计算P'时使用Fj代替F
- 计算S, KK 和 PP使用Hj代替H
需要注意的是,只有方程是非线性的,才使用雅可比矩阵,在本课程中,预测阶段的f(x,u)是线性的。
- 激光雷达预测,测量阶段均为线性
- 雷达测量,预测阶段为线性,测量阶段为非线性
传感器数据融合
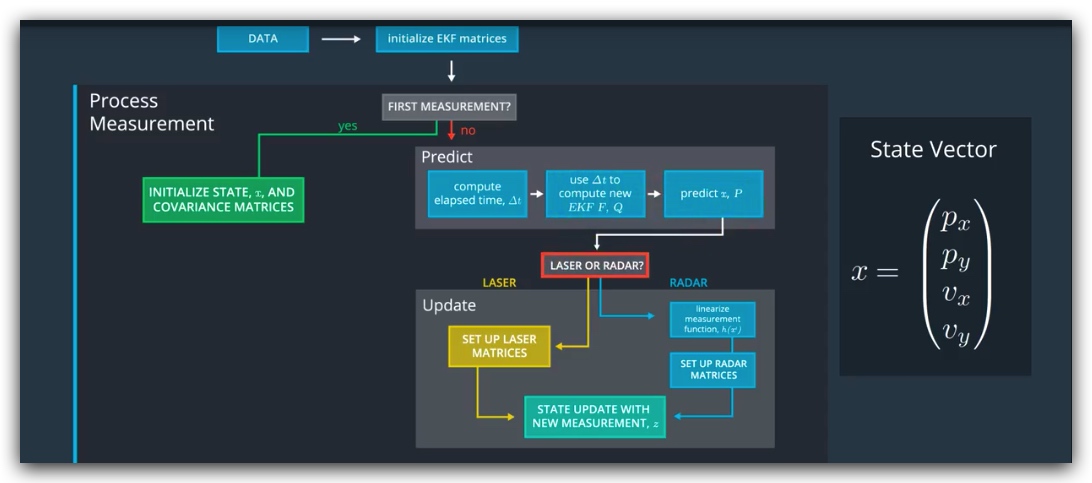
流程
- 跟踪目标的状态空间为四维向量x,分别为二维位置和二维速度
- 每当有新数据到达,均出发估算函数process measutement
- 第一次计算时,初始化状态和协方差
- 在预测流程,首先计算两次数据间时间差,然后估算位置z和协方差P
- 在测量过程中,首先去分数据来源
- 来自雷达的数据:必须计算雅可比矩阵Hj,因为雷达的测量函数时非线性的
- 来自光雷达数据:使用普通卡尔曼滤波,使用H和误差R
融合误差
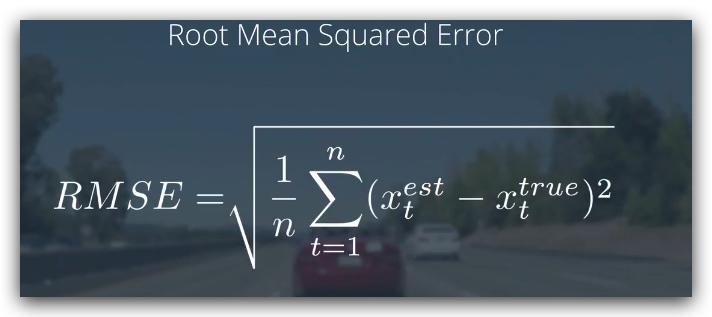
VectorXd CalculateRMSE(const vector<VectorXd> &estimations,
const vector<VectorXd> &ground_truth){
VectorXd rmse(4);
rmse << 0,0,0,0;
// check the validity of the following inputs:
// * the estimation vector size should not be zero
// * the estimation vector size should equal ground truth vector size
if(estimations.size() != ground_truth.size()
|| estimations.size() == 0){
cout << "Invalid estimation or ground_truth data" << endl;
return rmse;
}
//accumulate squared residuals
for(unsigned int i=0; i < estimations.size(); ++i){
VectorXd residual = estimations[i] - ground_truth[i];
//coefficient-wise multiplication
residual = residual.array()*residual.array();
rmse += residual;
}
//calculate the mean
rmse = rmse/estimations.size();
//calculate the squared root
rmse = rmse.array().sqrt();
//return the result
return rmse;
}